

So my world has been a bit upside down lately. However, I’m hoping that as we drift into the holiday season things will settle down a bit for the family and me. That is if I can shake the last vestiges of jet lag. There are no shortages of projects for me to work on. But I’m most excited to get back to the latest version of my star tracker. So with my second son in tow, we set up on our back porch to take advantage of a rare clear night. The goal is to perform a little testing of the new rig with my Canon 250D and 50mm lens. Then I can do a little pixel-peeping to see how well the tracker performs at 50mm.
Ground Clouds Suck!
No sooner than we got set up, I began to see a gentle mist rolling into the area. Maybe it will blow over? Well, we decided to take what we were given. In Polish, the word for fog is mgła, pronounced m-gwah. I find that rather onomatopoeic. Exactly, yuck, the only thing worse than clouds in the sky are clouds on the ground. So spoiler alert – we only managed a paltry 13 minutes worth of exposure time. But we did get some nice images of the Pleiades for testing before getting completely socked in.
Time for Some 50mm Pixel-Peeping
So what am I looking for? I want to ensure that the tracker timing is on point. The latest version of my tracker has a gear reduction ratio of 50:1. I’m using a NEMA17 hybrid 0.9 step angle stepper motor with an A4988 driver. After enabling 1/16 microstepping, I have a total gear reduction of 800:1 or 320,000 steps per revolution. To accurately track, I need to move 1 step every 269ms.
For this test, I’m shooting at F/4, ISO 1600, and 24 second exposures. After registering my images in SIRIL, I can see that the roundness of my stars is remarkably consistent at 0.71 to 0.77. Below is the final stacked unprocessed image.
The web compression on this scaled image is rough, but zooming in 400% on the center of the Pleiades, you can see the roundness quality of the stars. Now, there is a little bit of a drift in my stack, but admittedly, I wasn’t as pedantic about my polar alignment this time. I figured there wouldn’t be much of an observable impact at 50mm – and I was right.


If you’re reading carefully, you might be shocked that the roundness calculations were rather poor. Remember that this calculation takes all the stars across the image into consideration. And with the 50mm Canon lens, I have to live with the angels in my image corners – also known as coma. I characterized this phenomenon in a previous post if you want more details. But to illustrate the effect, you’ll see a capture from the upper right corner of the stacked image on the right. My beautiful round stars in the center have grown wings and tails in the corners! At 50mm though, I can live with this.
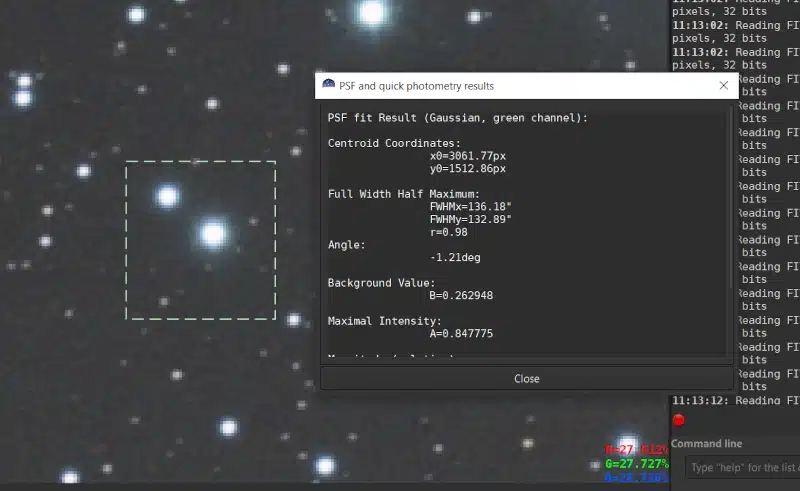
Just to reassure you, I ran a point spread function (PSF) analysis on a couple of stars near the center of the image. You can see that the star roundness in this area of the image is very good at 0.98!
Testing Result
The newest version of the tracker’s timing calculations are good. The big test will obviously be moving to the 135mm lens the next chance I get. The only thing I’m somewhat nervous about is the weight with the 135mm. While I’m happy with how my latest design is coming along, it is easily back-drivable. Not sure yet what kind of problems I may have there.
I’m also pleased thus far with the tracker’s flexure. While my desire is to have as small a tracker as possible, it’s clear to me that having a solid tracker is the most important design factor. I am reinforcing the traker elements with aluminum beams and that appears to be having a big impact on the overall rigidity.
Anything Else Cool Going On?
Actually, yes! In my quest to design the most inexpensive tracker, I’ve been looking into redesigning the electronic elements which by far are the most costly. I’ve begun testing an ESP32-C3 chip as the primary controller and so far so good. I hope to swap out circuits for testing in the coming week. To understand why this is important, the Arduino BLE Sense Rev2 chip I’m using currently runs close to $60. I can procure the ESP32-C3 chip for around $6.50. Whoo Hoo! And as far as I can tell, for my application, this is going to work just fine – but stay tuned.