![]()
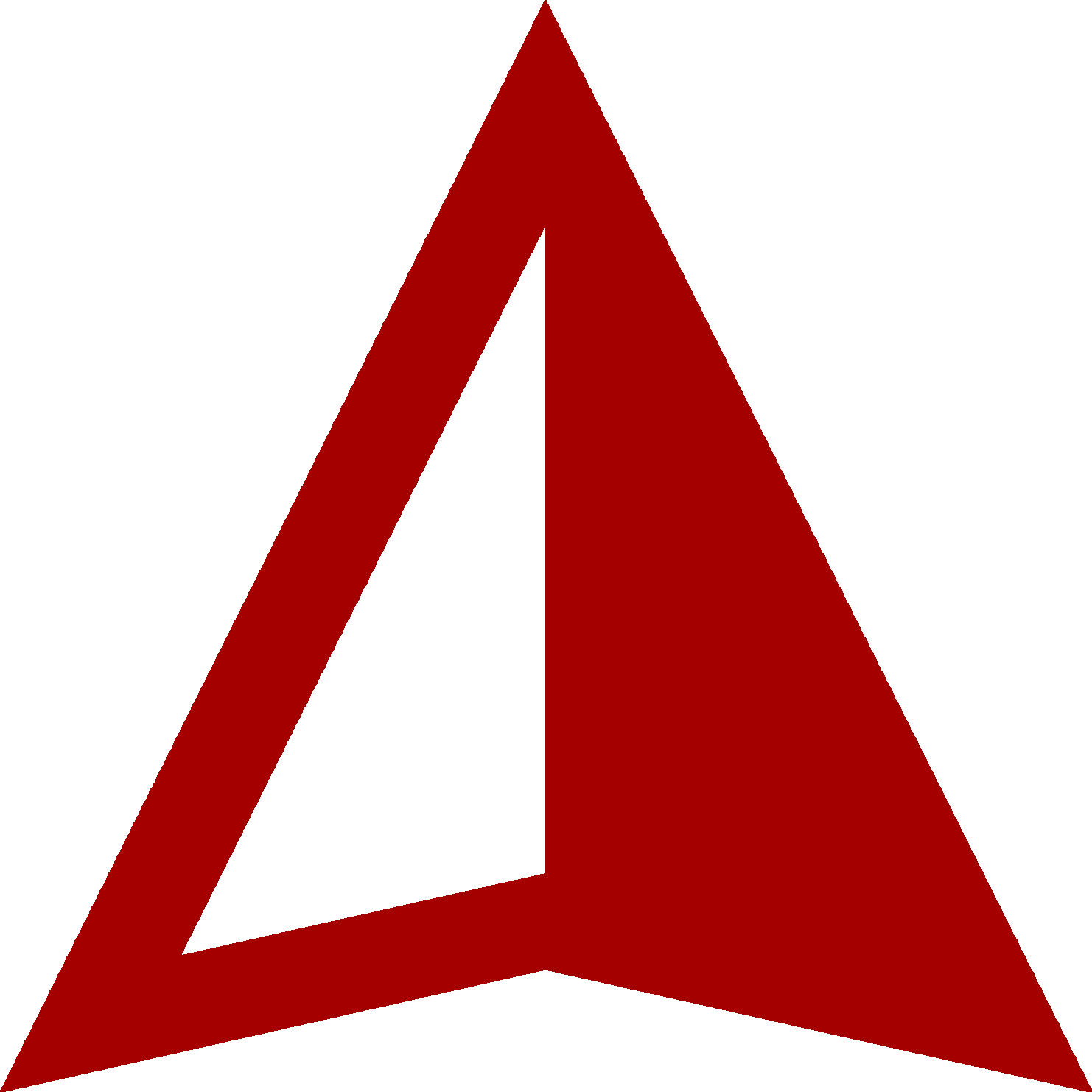

Well, little to do but wait right now. I’m still on the mend but I’ve made a bit of progress on the new star tracker. I managed to 3D print a wedge mount which I’ll talk about in a post later. Oh, I also ordered some electronics for the star tracker to begin development and testing. I suppose that is about as exciting as this post is going to get because we’re still socked in with wind, rain, snow, and clouds.
Ordering Parts
I visited Mouser.com and for the microprocessor, I’ve ordered the Arduino Nano 33 IoT board. I was thinking of ordering the Arduino Nano Every which was a little cheaper. However, I suppose that after I get the star tracker working, I’m going to want to extend its functionality. So it made sense to go with the Nano 33 IoT as I’m thinking I eventually might want to write a React Native program to control the star tracker. The Nano 33 IoT has Wi-Fi and Bluetooth capability which will be critical if I decide to go that route.
One thing I nearly overlooked though was that the Nano 33 IoT I/O pins operate at 3.3V instead of 5V. At first, I thought I’d be sunk because I’m going to use a UNL2003D TTL Darlington array to drive the stepper motors. I believe the signal pins will be fine but I was worried about sourcing the 5V to drive the chip. But as it turns out, as long as I power the Nano 33 IoT via the USB port, I can solder bridge the USB power to drive a 5V output pin that I’ll run to the UNL2003D board. Phew.
Since I’m going to run the device via the USB port, I’ll need to ensure that my powerbank has enough juice to power the electronics. Again, this won’t be a problem as I’m going to be using a 10000mAh power bank that can source 5V at 2.1A. I know the Nano 33 IoT is going to draw about 1A when programmed, so I think everything is going to be ok. But I’ll take it slow when I start prototyping to avoid any problems.
Other Ideas
Well, shipping was free if I spent $50, so I bought 2 stepper motors with the Nano 33 IOT. I’m thinking that in my spare time I’ll design a focuser for the Samyang 135mm f/2. Just an idea at this point but also, one can never have too many stepper motors. I’ve got enough electronic bits and bobs around to throw something slick together eventually. That’s all for now and I’ll post soon regarding my 3D printed wedge for the new star tracker.